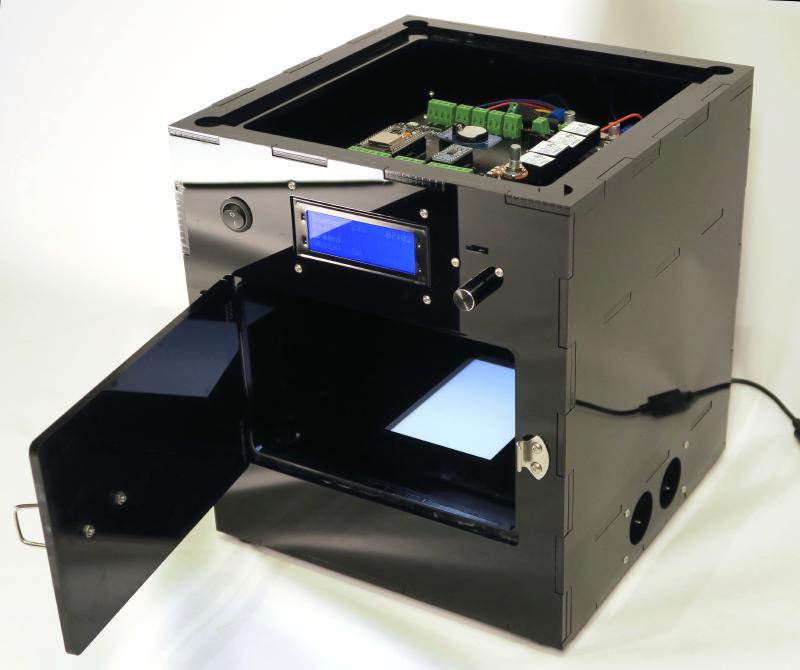
Lab Engineer at Brandeis University
Working with the Brandeis Rosbash Lab to redesign the FlyBox, a Drosophila Activity Monitor



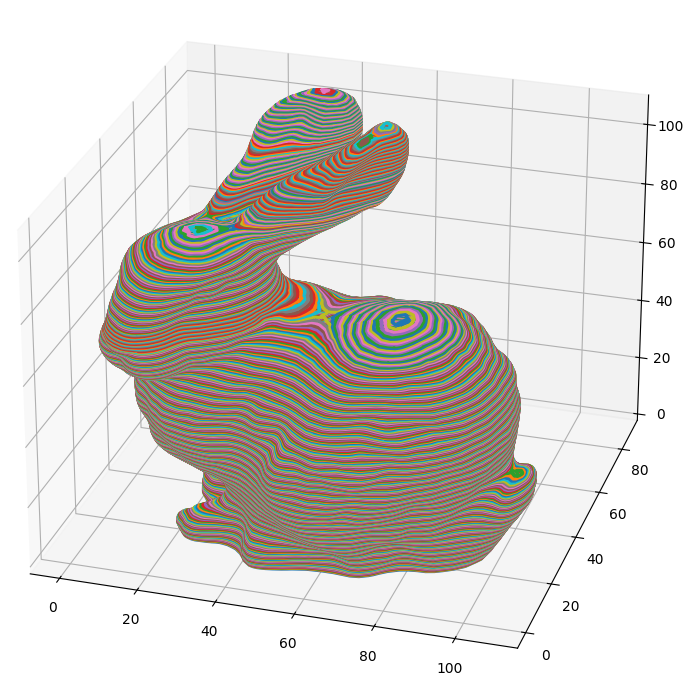
Custom 3D Printer Slicer for Fiber Reinforced Prints
A flexible and robust path planning algorithm designed for 3D printers using fiber inlays

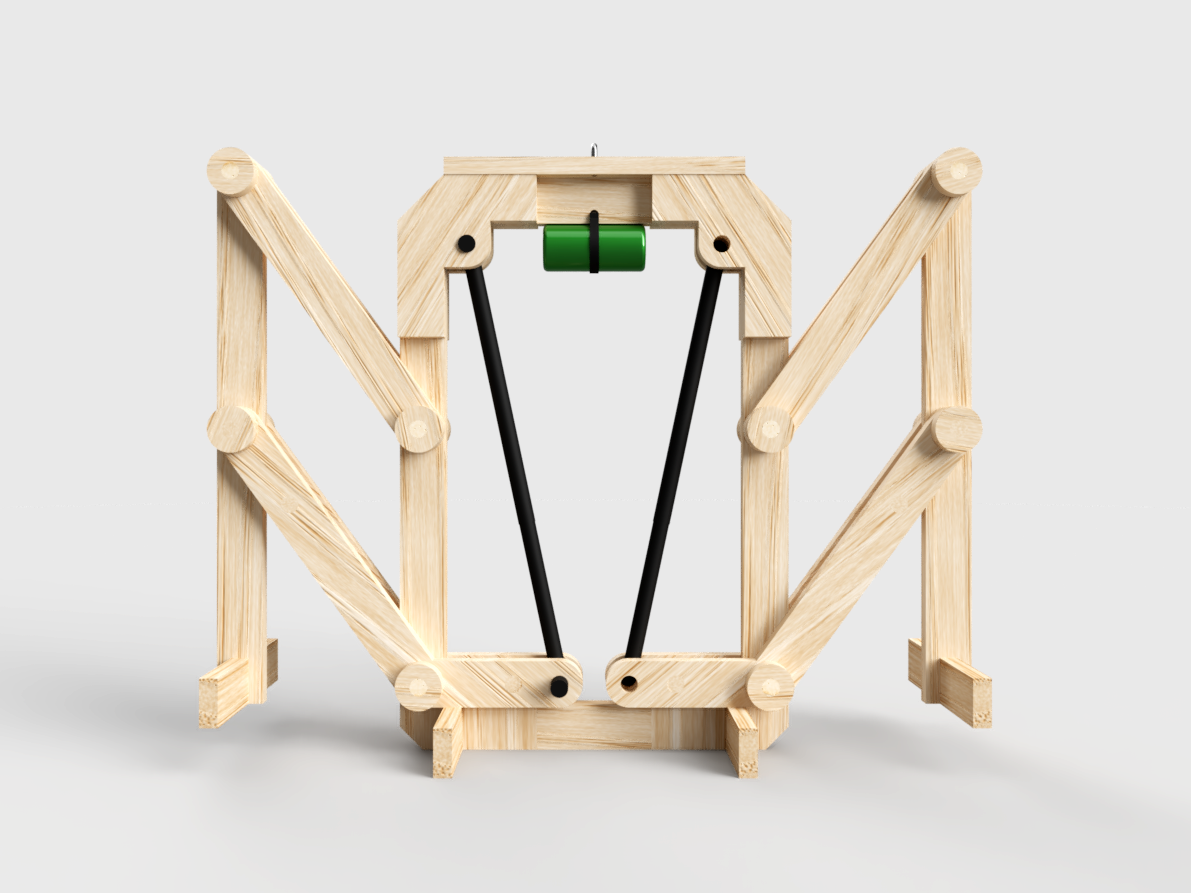
Path Planning for Robotic Arm Carving a Sculpture
Trying to optimize the path planning for a robot to carve a model out of a rectangular prism
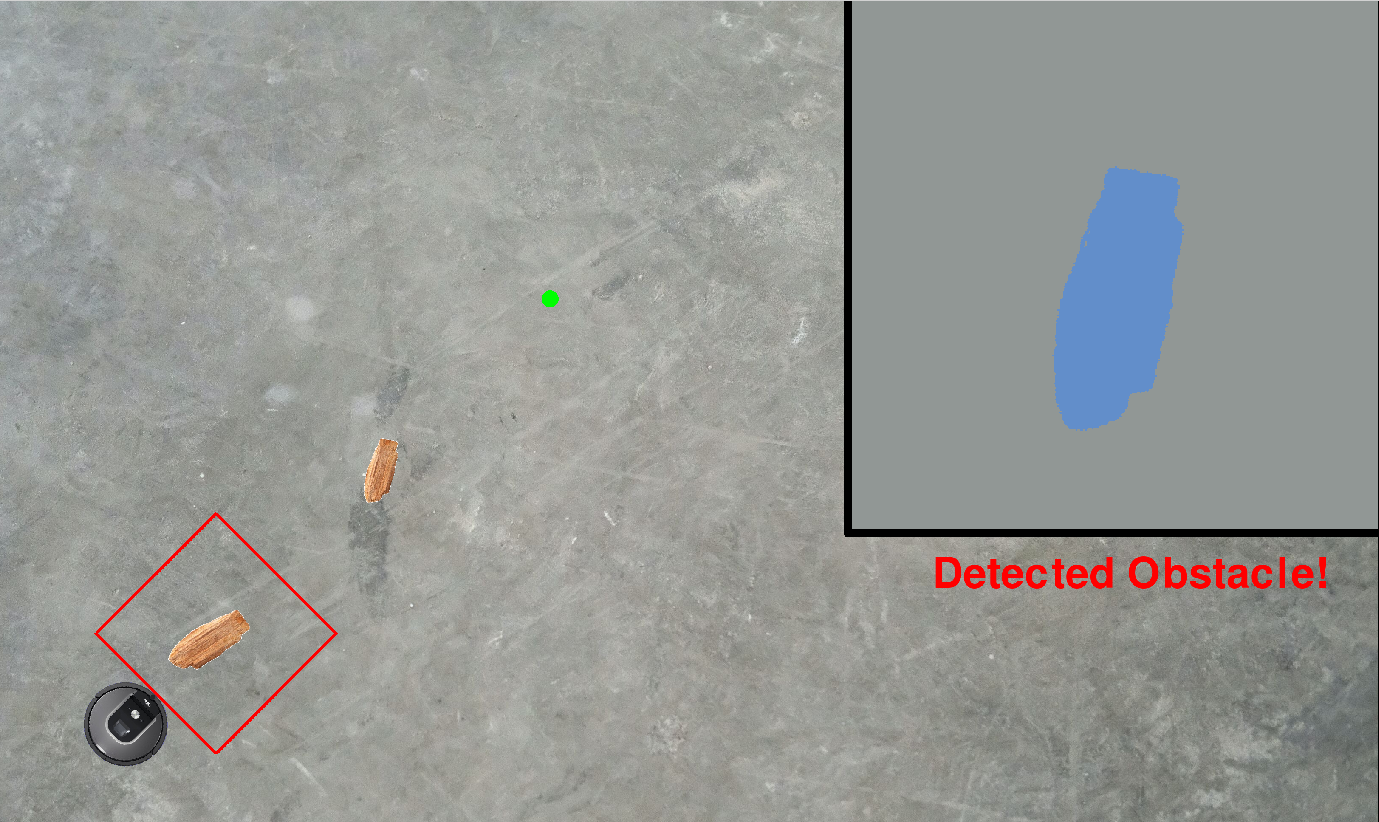
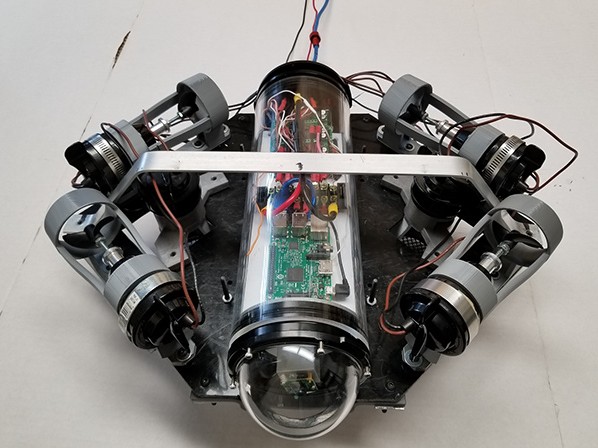
Warehouse Robotics Obstacle Avoidance
A obstacle avoidance system using an RGB camera, image segmentation, and CLF-CBF path planning



Path Planning for Robot Vacuum using Gradient Descent
Autonomous robotic path planning with a Neato self-driving vacuum cleaner
Rock Paper Scissors CNN Machine Learning Model
A simple CNN machine learning model to identify hand poses built with Pytorch
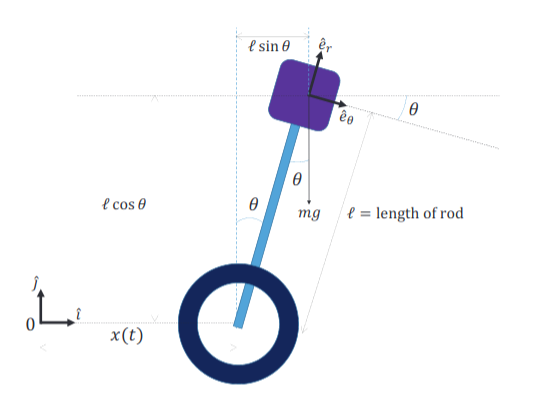
Wheeled Inverted Pendulum Robot Using PID Control System
An inverted pendulum robot controlled by a PI control system