Waypoint Navigation Rover
May 2021

Overview
With a team of 5 other Olin students, I helped built a fully autonomous rover that was capable of driving around campus. The Rover was capable of driving from point to point while preforming obstacle avoidance. The Rover also had a manipulator on the front that was capable of picking up and dropping items.
The rover navigated using a series of sensors. On the rover were two sonar sensors, five infrared distance sensors, a GPS module, and webcam capable of object recognition. The rover was powered entirely off of a Raspberry Pi and was built using the chassis and motors of a 4WD R-C car.
The Rover was programmed entirely using MATLAB.
Photos and Technical Documentation
Here are several photos of the rover’s construction and some of the technical documentation.
Rover Construction
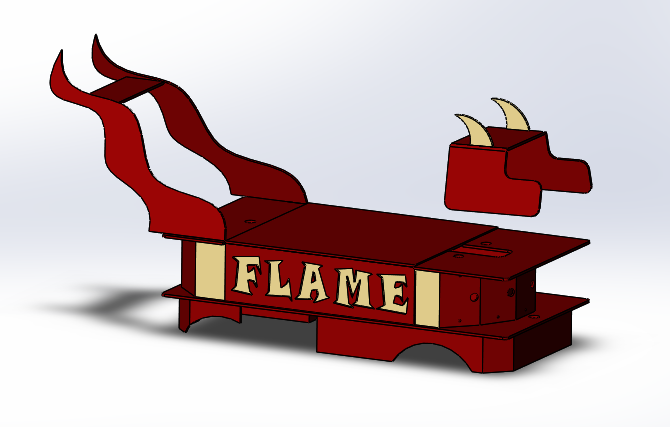
Here is our preliminary CAD model of the rover.
Here is our prototype model made out of laser cut cardboard.

After making a prototype, we decided to make the rover out of Delrin, a sturdy yet easily machinable material. To cut all the parts, we decided to CNC router it.

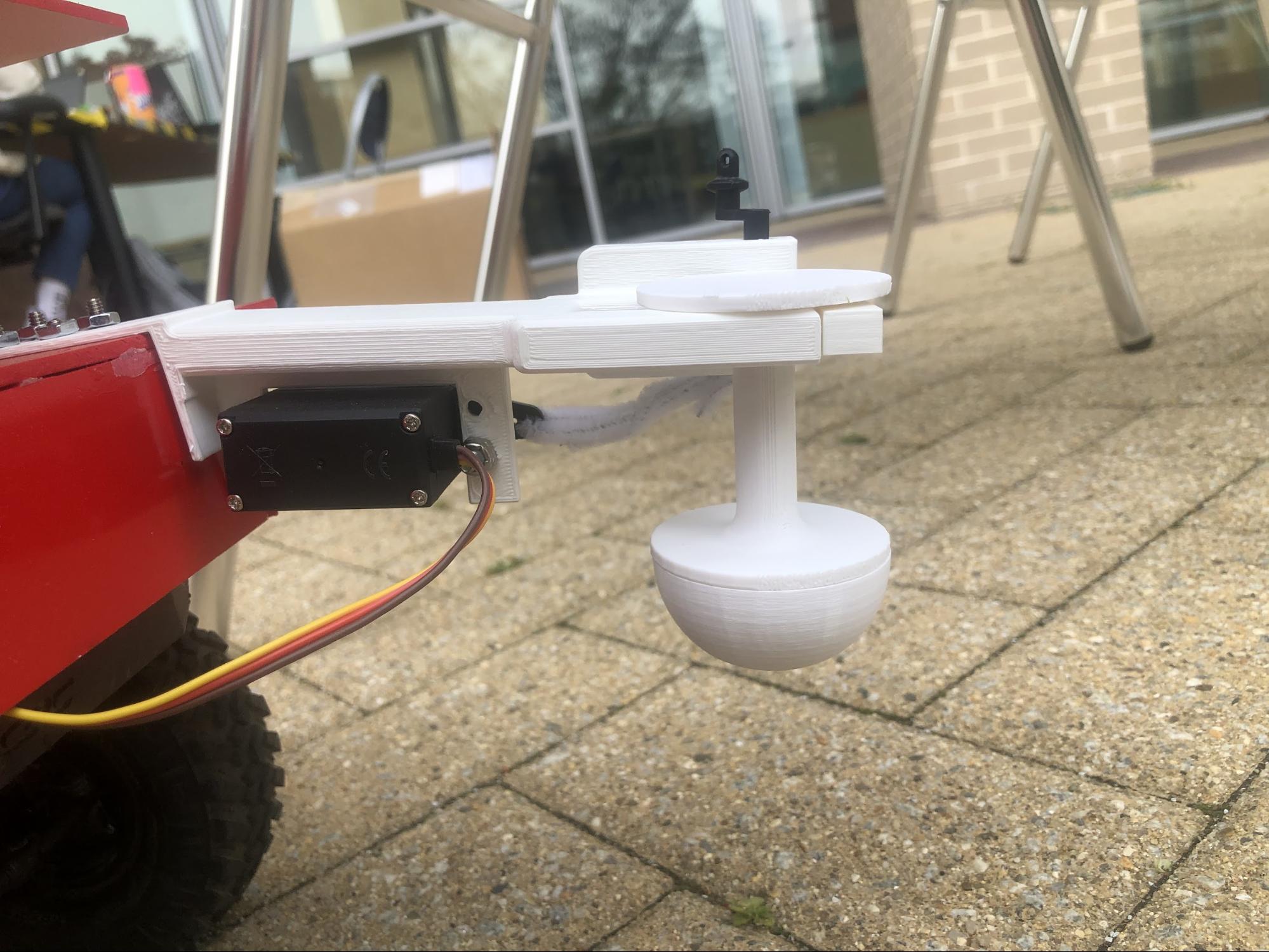
Here are some photos of our front manipulator/claw.

Here is our final rover during a test run.

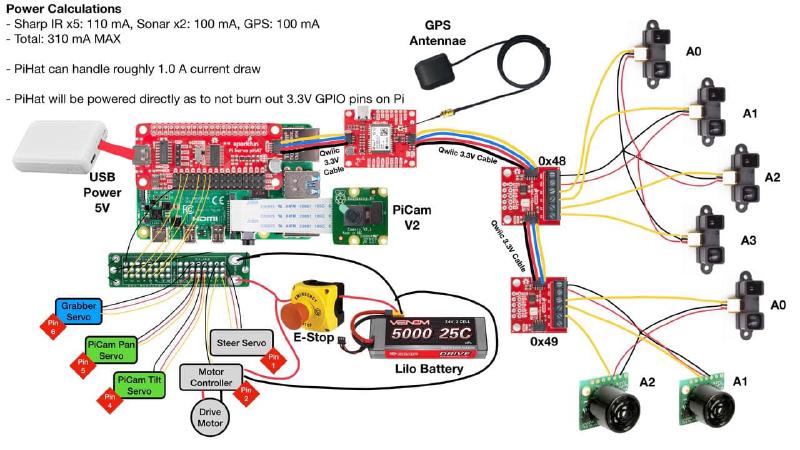
Electrical Design
Here is an electrical diagram of our rover and power calculations.
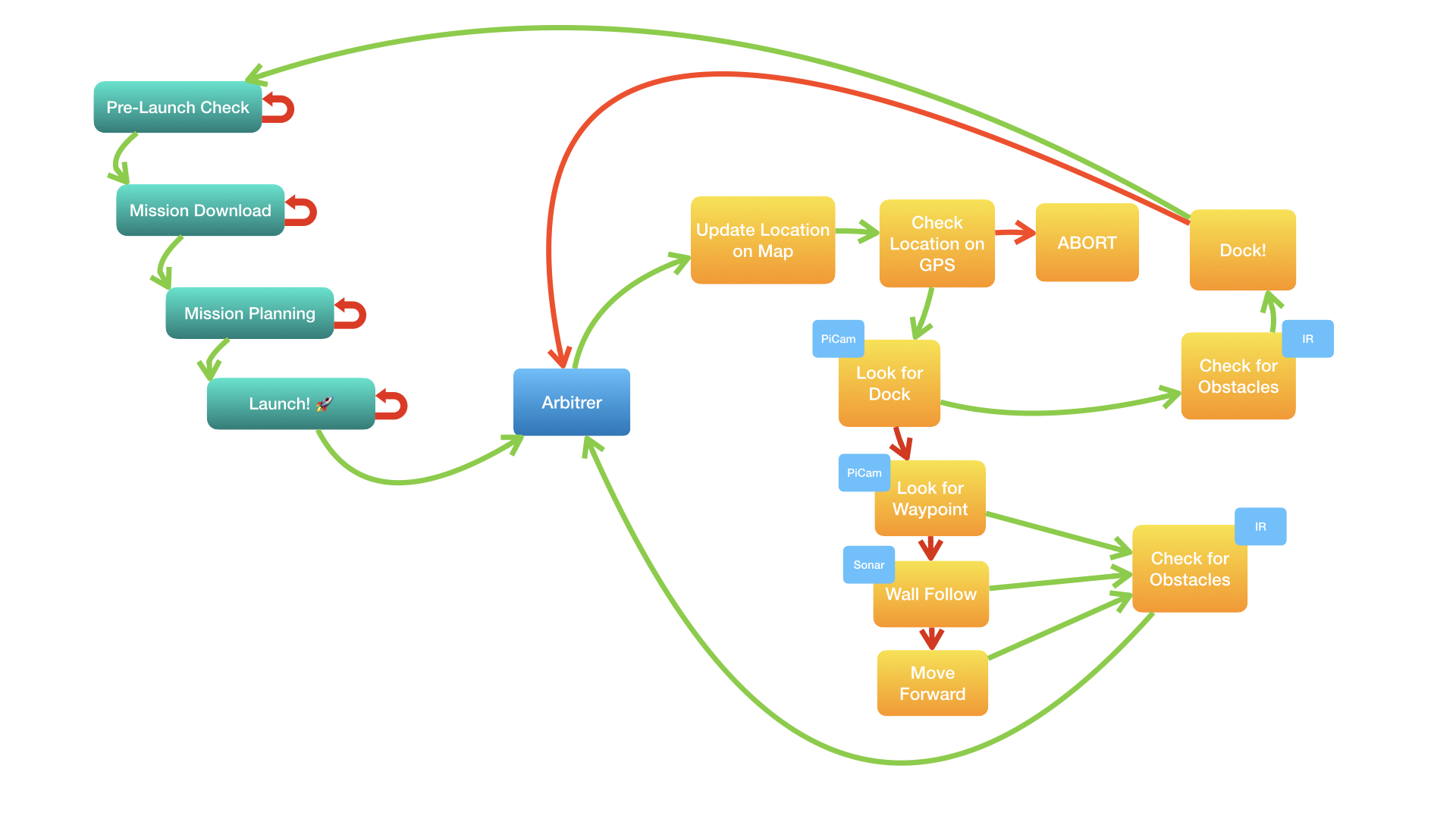
Software Design
Check out all our code is on the following GitHub respository
Here is a finite state machine diagram that represents our rover’s software process.